
近日,我院科学创新实验班本科生吴显峰及其团队在学术导师赖重远副教授的指导下,与美国纽约州立大学终身教授、国际模式识别协会(International Association for Pattern Recognition, IAPR)会士、美国电气和电子工程师协会(Institute of Electrical and Electronics Engineers, IEEE)会士袁浚菘及其博士生栾天宇合作,在三维点云补全领域取得重要突破。相关工作成果以“少点形状补全(FSC: Few-point Shape Completion)”为题,被人工智能领域顶级会议——计算机视觉与模式识别会议(IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2024)录用。江汉大学为第一完成单位,这是我校首次在中国计算机学会推荐国际学术会议和期刊目录下A类会议上发表论文。
CVPR始于1983年,根据2023年7月19日谷歌学术公布的学术期刊和会议影响力排名,CVPR在所有学术刊物中位居第四,仅次于Nature、The New England Journal of Medicine和Science。今年的CVPR会议总共收到了来自全球人工智能相关机构研发人员的11532篇有效投稿,组织了24名高级别领域主席、447名领域主席和9872名审稿人参与审稿,最终有2719篇论文被录用。
吴显峰等同学的论文聚焦于自动驾驶和自主机器人领域的三维重建问题。现有的物体点云补全理论与方法都是建立在具有数千个点的点云基础之上。此情况下的物体点云中的点具有相对稳定的邻域,能从局部到全局提取物体形状的多尺度特征。绝大多数现有的补全方法都是充分利用上述点云特性,取得了很好的补全效果。然而,在真实自动驾驶场景下,受到物体尺寸、距离和遮挡等因素的影响,往往能够获取到的物体点云数量仅为数十个。此情形下的物体点云中的点不具有稳定的邻域,且局部信息缺失,进而导致上述补全方法的性能急剧下降,乃至失效。研究开辟了稀疏点云补全这一新的赛道,并在香农信息论的指导下,给出了日常物体三维点云补全所需的最少点的数目。针对稀疏点云局部信息缺失的特点,提出了基于全局注意力机制特征提取和对抗性生成式网路特征修正的少点形状补全方法。大量实验证实了提出的方法在最少点情形下实施补全的可行性,其无论是在数千个点的情形下还是在数十个点的情形下都优于现有方法,且在点的数目变化和未知类别物体补全等情形下均具有很好的鲁棒性。论文的预印本和相关代码已分别在arXiv和GitHub网站上公开。
图1 少点形状补全方法
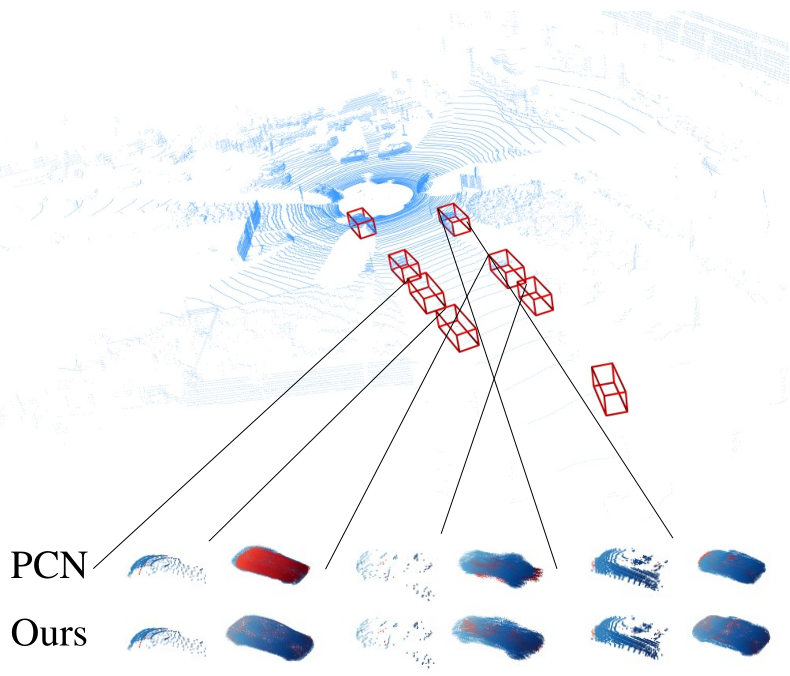
图2 真实自动驾驶场景下目标点云补全效果
吴显峰同学自选拔进入炳灵学院接受荣誉教育以来,一直在赖重远副教授指导下从事研究。为更好地指导本科生研究,指导老师们借鉴敏捷项目管理方法,利用每周固定例会评估研究进展,再结合专题会议应对研究中遇到的挑战。在论文撰写过程中,鼓励本科生们采用先进的在线协作式编辑方法,对论文的文字、图表、参考文献进行实时更新,极大地提升了写作效率。该学生团队获批的“基于Point-Nerf和Diffusion Model的稀疏点云三维重建“和“基于联邦学习的自动驾驶汽车点云信息处理隐私安全研究”两个国家级大学生创新训练计划项目,以及“一种基于新型编解码器网络的点云补全”、“一种基于点云神经网络的物体识别方法”两项江汉大学学生科研项目,为此次高水平论文成果奠定了基础。